天眼查显示,珠海一微半导体股份有限公司近日取得一项名为“基于连通性的区域判定方法、芯片及机器人”的专利,授权公告号为CN113110473B,授权公告日为2024年5月07日,申请日为2021年4月26日。
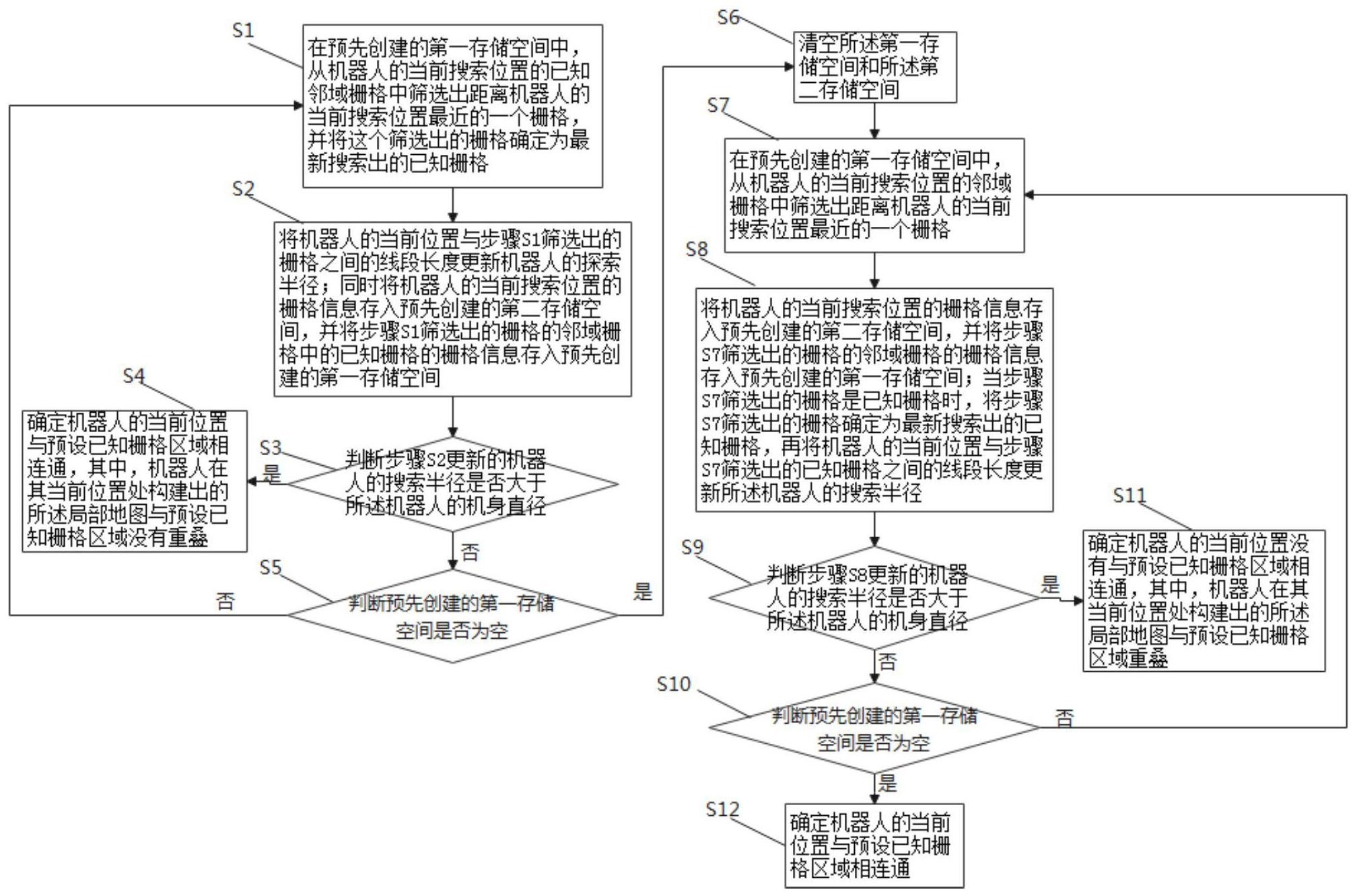
本发明公开基于连通性的区域判定方法、芯片及机器人,所述区域判定方法从机器人的可达性的角度去控制机器人对邻域的已知栅格进行连通域搜索,通过连通域搜索的方式,由近及远地在已知栅格区域内识别连通性,再由近及远地在所有类型的栅格区域内识别连通性,包括机器人当前位置处构建的局部地图与已知地图区域邻接连通、机器人当前位置处构建的局部地图与已知地图区域重叠、机器人当前位置处构建的局部地图与已知地图区域互不连通,从而全面地判定出机器人的当前位置是否与相应距离处的已知地图区域相连通,进而判定机器人的当前位置是否处于已知地图区域内。