5月27日-29日,2026第十届集微大会在上海张江科学会堂隆重举行,思特威车载事业群总经理兼飞凌微电子CEO邵科在大会5月28日召开的“端侧AI峰会”上发表了以《CIS+SoC融合方案助力端侧视觉AI全场景应用》为主题的演讲,分享了端侧视觉AI的应用趋势、行业痛点,以及思特威基于CIS+SoC融合的技术方案与落地进展。
邵科指出,“端侧视觉能有效帮助设备观察环境、识别事件,应用空间非常广阔。思特威的核心业务主要聚焦三大领域:智能安防、车载电子、智能手机。多年来,公司在这三大领域持续深耕,出货量稳居行业领先地位。除了我们的三大主业外,端侧视觉应用也广泛延伸至日常生活场景,包括机器人、工业视觉、AR/VR 等,应用场景非常丰富。”
不过当前端侧视觉AI在方案落地与规模化应用中,仍面临一些痛点,一方面来自CIS本身;另一方面来自CIS与SoC的适配协同。从CIS来看,其成像性能非常关键,直接影响最终算法的效果。同时,视觉系统不仅包含CIS,还包括后端的主控及其他SoC,这带来了适配方面的问题。此外,不同应用对算力的需求各异,因此对SoC的选择和适配在实际应用中也对效果产生重要影响。
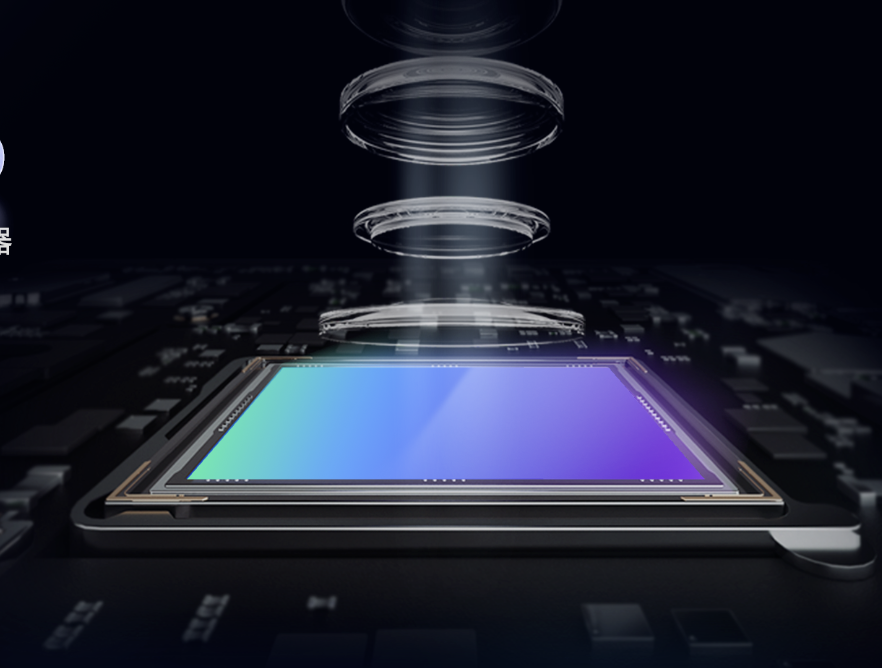
邵科提到,“因此,在成像方面,思特威持续投入CIS性能的提升,不断研发新技术,并推出系列化新产品。例如针对高动态范围成像,公司在车载和手机应用中持续迭代,利用自研的LOFIC HDR技术,在单帧曝光中获得更好的成像效果。同时,在夜视成像方面,通过提升像素的感光度、优化噪声控制等方式,持续改善夜间成像质量。另外针对不同行业应用,公司还开发了多种特色技术。例如,车载应用中的LED闪烁抑制技术,手机应用中的相位对焦技术,以及针对电池供电设备的低功耗快启技术等,可以更好地支持多样化的AI应用。”
在CIS+端侧SoC融合上,思特威针对车载和工业视觉等应用推出了一系列方案。在车载方面,覆盖前视/后视、舱内监测(DMS/OMS)、电子后视镜(CMS/E-Mirror)、哨兵模式等车载视觉应用场景,能够在端侧进行图像增强,并为后端处理提供预处理的图像数据。

邵科进一步介绍了思特威已实现大规模量产的舱内OMS方案,“随着智能驾驶的发展,座舱内不仅需要DMS(驾驶员监测系统),OMS的应用也越来越广泛。该方案既需要输出高质量的视频图像用于交互和娱乐,也需要通过近红外成像实现舱内的识别与感知。因此,我们将500万像素的RGB-IR图像传感器与轻量级SoC集成在模组端,能够同时输出RGB和IR图像,并利用ISP技术进行图像增强。”
另外,在车载应用中,越来越多新能源车开始支持“哨兵模式”,这不仅能提升用户体验,也增强了车辆的安全性。思特威基于CIS和轻量级SoC,在模组端实现了全天候、低功耗的哨兵模式。该模式下,传感器以低功耗、低帧率持续输出,模组端通过轻量级算法逐帧检测。当识别到异常时,系统会唤醒后端域控制器,并将预存的异常图像数据发送给后端,以便进行后续处理。在非车载应用方面,思特威聚焦于单目和双目模组端侧的智能感知,可应用于智能硬件、智能家居、工业检测以及各类需要图像增强的场景。
对于端侧视觉AI技术展望,邵科提到:“我们持续迭代CIS技术,同时致力于将视觉与更多AI功能相结合。未来有两个主要方向:第一,在AI Sensor方面,我们预研将CIS与SoC通过3D集成方式结合,在单一芯片上实现高质量的ISP核心功能,并支持AI加速。第二,在AI SoC方面,我们持续研发高性能的近存计算,通过“NPU+ASIC异构”一体化的方式,实现多传感器融合,并探索未来将大模型应用于端侧的场景。”
邵科在演讲的最后表示,“总体而言,思特威坚持以图像传感器和视觉技术为出发点,持续与AI深度融合,覆盖从数据采集、数据处理、数据传输到最终感知的全链条,构建3+AI战略。”