天眼查显示,珠海一微半导体股份有限公司“一种斜坡坡度计算方法、机器人控制方法、机器人和芯片”专利公布,申请公布日为2024年10月18日,申请公布号为CN118778653A。
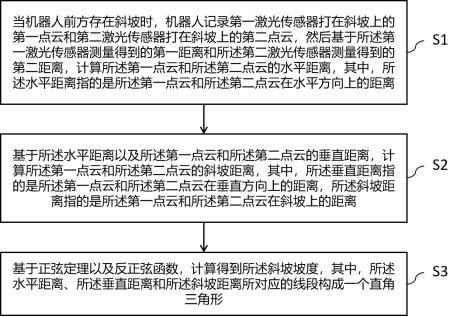
本申请提供一种斜坡坡度计算方法、机器人控制方法、机器人和芯片,通过两个激光传感器获取打在斜坡上的第一点云和第二点云,然后计算第一点云和第二点云的水平距离和斜坡距离,再与已知的垂直距离共同组成一个直角三角形。在该直角三角形中,仅需分别应用一次正弦定理以及反正弦函数即可获得斜坡坡度,计算难度极低、效率极高。所述斜坡坡度计算方法使得机器人不需要通过碰撞或者爬上斜坡就可以提前知道斜坡的度数,大大提高了安全性。在本身安装有激光传感器的机器人上,不需要再新增激光传感器或只需新增一个激光传感器,成本较低,实用性强。