

点云目标识别是实现三维环境智能感知与理解的重要技术之一,在自动驾驶、无人系统、空间探测等领域具有广泛的应用前景。然而,在实际场景下,受传感器噪声、环境干扰等因素影响,点云数据常存在扰动、缺失与形变等退化现象,显著降低了传统识别方法的准确性与泛化能力。针对真实复杂环境下点云目标智能识别中的关键科学问题和难题,许廷发、李佳男科研团队开展了原创方法和关键技术攻关,取得了突破性研究进展,相关论文陆续发表于IEEE TPAMI、NeurIPS (CCF-A)、ICCV (CCF-A)和ICLR等人工智能领域国际顶级期刊和会议,受到学术界的广泛关注。
科研团队主要从点云数据增强、特征学习与时序建模三个层面开展系统性研究,提出了样本自适应在线数据扩增方法、感知对抗模式捕获策略,以及时序关联高效建模框架:
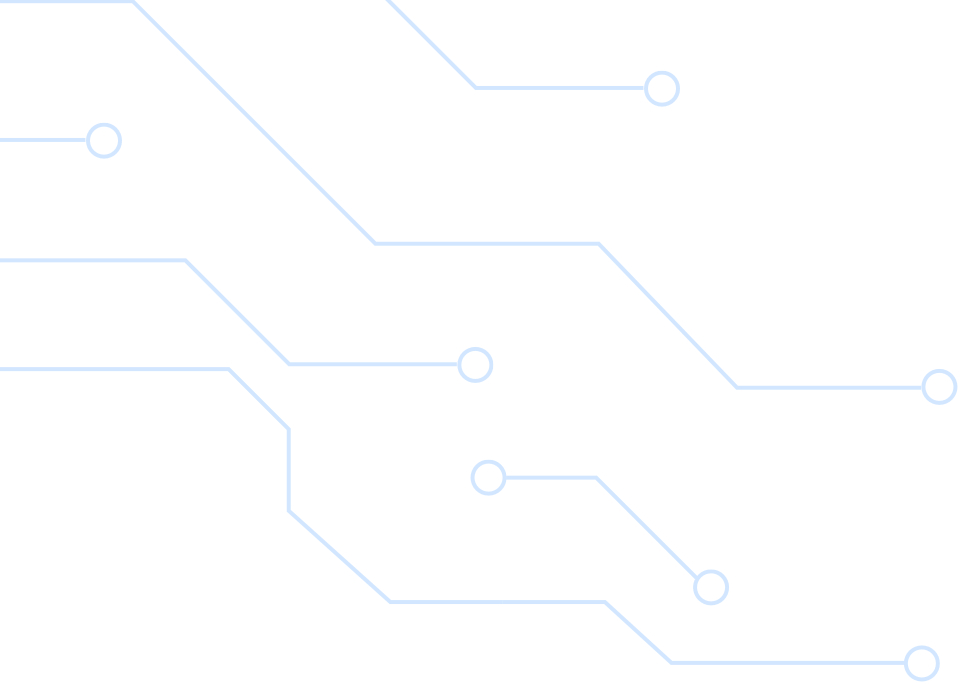
1.样本自适应在线数据扩增方法(IEEE TPAMI 2025):该方法结合输入点云的空间结构特征与感知模型状态,自适应对样本施加多级形变与遮挡,生成贴近真实失真场景的点云数据,拓展训练样本的多样性,从而显著提升模型鲁棒性(图1)。
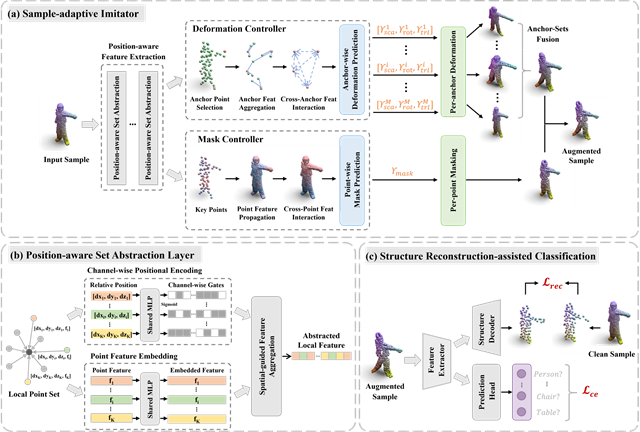
图1. 样本自适应在线扩增方法示意图。
2.基于对抗学习的点云模式捕获策略(NeurIPS 2024):该策略在训练阶段引入对抗性特征擦除机制,遮蔽模型已学习的目标模式,迫使从目标其他区域挖掘更具判别性的特征,进而强化对点云全局结构的感知能力(图2)。
图2. 基于对抗学习的点云模式捕获策略。
3.时序关联高效建模框架(ICLR 2025):该框架通过关联机制将输入点云帧与捕捉到的时序动态信息相融合,提取深度运动线索并对整个序列的时序特征进行统一建模,有效降低计算冗余,显著提升了处理效率(图3)。

图3. 不同模型精度与速度的性能对比。
通过以上系列研究,总体构建了面向复杂环境的点云目标鲁棒识别一体化技术架构,成功突破了点云数据高效扩增、精细化特征表达以及运动特征高效挖掘等关键技术瓶颈。提出的系列方法显著提升了点云识别模型在失真条件下的鲁棒性与泛化性能,并大幅提高了识别效率。
该系列研究成果提升了复杂环境下点云感知技术的可靠性与实用性,为无人系统自主导航、空间目标感知等领域的实际应用奠定了重要的理论支撑与技术保障。





评论
文明上网理性发言,请遵守新闻评论服务协议
登录参与评论
0/1000